

.
xINSTALE CLICANDO NO ARQUIVO PARA DOWNLOAD




Minecraft é um popular videogame sandbox onde os jogadores podem construir, explorar e criar em um mundo virtual feito de blocos. No entanto, os jogadores às vezes podem experimentar o código de erro 401 ao jogar Minecraft.
O erro geralmente ocorre quando o jogo não consegue se conectar a um servidor. Esse erro pode impedir que os jogadores acessem o mercado do Minecraft, que é uma parte fundamental da experiência do Minecraft para muitos jogadores.
O que é o código de erro L-401 no Minecraft?
Código de erro L-401 Minecraft é um erro que geralmente aparece quando você está tentando se conectar a Mercado no Minecraft. Quando você tenta se conectar ao Marketplace, ele exibe uma mensagem dizendo “Estamos tendo problemas para conectar ao mercado agora, tente novamente mais tarde.”
Você pode enfrentar esse erro se o servidor Mojang estiver inoperante no momento em que estiver tentando jogar. Também pode ser um erro de rede em alguns casos.
Se você está enfrentando o código de erro L-401 Minecraft, L-401 Minecraft no PS5, Xbox ou outros; este post vai mostrar como corrigi-lo.
Como corrijo o código de erro L 401?
- Verifique o status do servidor do jogo
- Reinicie seu console
- Ativar dados de celular no Minecraft
- Limpe o cache do jogo
- Reinstale o Minecraft
1. Verifique o status do servidor do jogo
Na maioria dos casos, esse erro pode ser causado por um problema relacionado ao servidor. Se o problema estiver relacionado ao servidor, antes de tentar outras soluções, verifique o site oficial do jogo ou o identificador do Twitter para ter certeza de que não é um problema do servidor.
2. Reinicie seu console
Depois de confirmar que o servidor do jogo está funcionando, a próxima coisa que você deve fazer é reiniciar o console para ver se o problema foi corrigido.
Usuários do Xbox:
- Pressione e segure o Botão Xbox no seu controlador para exibir o centro de energia.
- Selecione Reinicie o console e pressione A.
- Selecione Reiniciar e imprensa A para confirmar a reinicialização.
- Reinicie o jogo, inicie o Minecraft e tente abrir o Marketplace.
Usuários PS 4 e 5:
- aperte o botão PS no seu controlador para abrir sua tela inicial.
- Selecione os Desligar opção.
- Reinicie o jogo após 30 segundos e tente novamente.
3. Ative os dados de celular no Minecraft
Muitos jogadores relataram que conseguiram corrigir o código de erro L-401 Minecraft no iPad depois de ativar os dados de celular no Minecraft. Isso também pode funcionar em qualquer outro Android e iOS. Portanto, para aplicar essa correção, desligue o Wi-fi no seu dispositivo e ative os dados móveis.
- Inicie o Minecraft e vá para Configurações.
- Role para baixo até Perfil.
- Ativar Usar dados de celular.
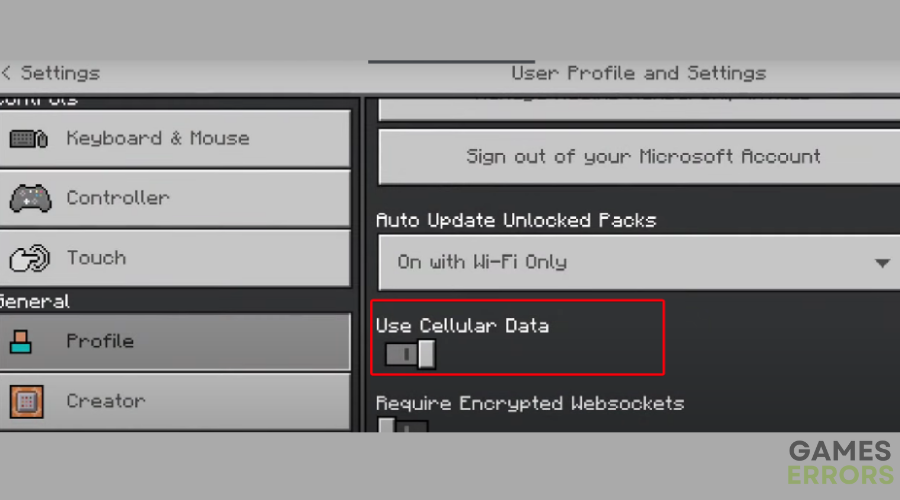
- Volte ao Marketplace para ver se está funcionando.
4. Limpe o cache do jogo
Um cache de jogo corrompido pode resultar em erros como o código de erro L-401 Minecraft no Xbox Series S, Xbox Series X ou código de erro no PS4 ou 5. Portanto, é importante que você limpe o cache ao enfrentar esse problema.
Usuários do Xbox:
- aperte o xbox botão no seu controlador para abrir o menu lateral.
- Clique em Meus jogos e aplicativos.
- Selecione ver tudo para ver todos os seus jogos e aplicativos.
- Selecione Minecraft.
- Destaque o Gerenciar jogo e add-on e selecione A no seu controlador.
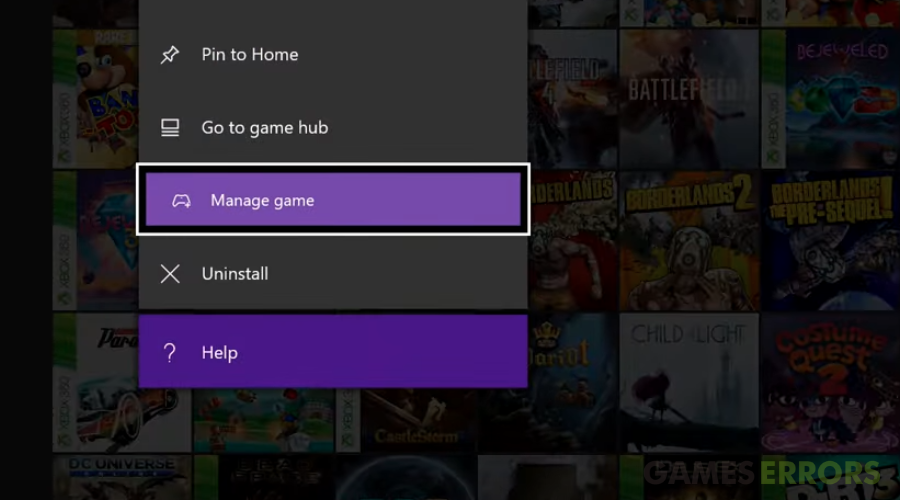
- Selecione dados salvos > Excluir tudo para excluir todos os arquivos de cache do jogo.
Usuários PS4:
- Desligue seu PS4 e desconecte imediatamente o cabo de alimentação logo após a luz verde parar de piscar.
- Aguarde 30 segundos, reconecte o cabo de alimentação e ligue o console.
- Carregue o Minecraft e enquanto o jogo está carregando, pressione e segure L1+R1 no seu controlador.
- Isso limpará o cache do jogo.
5. Reinstale o Minecraft
Se você ainda estiver recebendo o código de erro L-401 Minecraft no PS5, PS4 ou Xbox depois de tentar todas as soluções acima, exclua e reinstale o jogo como último recurso.
O problema pode ser causado porque o arquivo do jogo Minecraft está corrompido, portanto, este método pode corrigi-lo.
Artigos relacionados:
Conclusão
Apesar dos erros, o Minecraft é um jogo muito interessante e você não deve permitir que erros corrigíveis atrapalhem a diversão de aproveitar o jogo.
Se você estiver enfrentando o código de erro L-401 da loja do Minecraft e outros erros relacionados mencionados neste artigo, aplicamos nossas soluções para corrigi-los rapidamente. Além disso, para outras preocupações sobre esse erro do Minecraft, entre em contato nos comentários abaixo.
.



