.
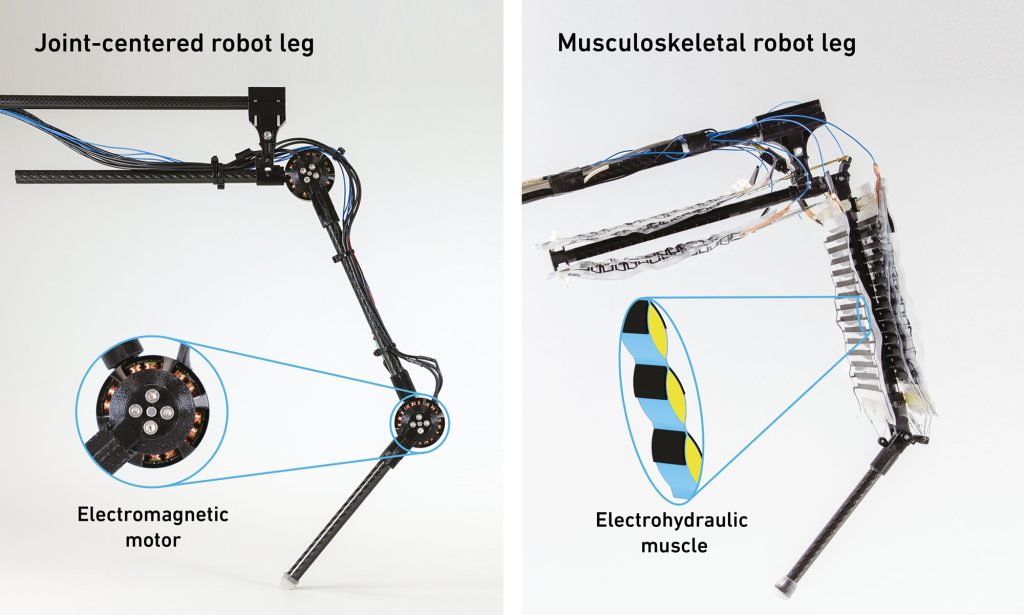
, para seu sistema musculoesquelético os pesquisadores usam atuadores eletro-hidráulicos – ou seja, músculos artificiais (direita). Crédito: Thomas Buchner / ETH Zurich e Toshihiko Fukushima / MPI-IS")
Enquanto as pernas robóticas convencionais são acionadas por um motor rotativo eletromagnético (esquerda), para seu sistema musculoesquelético os pesquisadores usam atuadores eletro-hidráulicos – ou seja, músculos artificiais (direita). Crédito: Thomas Buchner / ETH Zurich e Toshihiko Fukushima / MPI-IS
Pesquisadores disseram na segunda-feira que projetaram a primeira perna robótica com “músculos artificiais” — bolsas cheias de óleo que permitem que as máquinas se movam mais como humanos — que podem saltar agilmente sobre uma variedade de superfícies.
A pequena perna desencarnada do robô foi mostrada saltando sobre grama, areia e pedras em um vídeo divulgado junto com um novo estudo em Comunicações da Natureza.




Os pesquisadores esperam que a tecnologia possa ser usada no futuro para criar robôs humanoides para ajudar no “trabalho chato” em casa, disse o coautor do estudo Robert Katzschmann à AFP.
Robôs humanoides convencionais são construídos com motores e juntas metálicas rígidas semelhantes aos usados em linhas de construção de fábricas, explicou o professor de robótica da universidade ETH Zurich, na Suíça.
Além de serem extremamente caros, esses robôs enormes podem ser perigosos se entrarem nas casas das pessoas.
Se alguém “cair em cima de você, vai ser muito doloroso”, disse Katzschmann.
Um futuro robô ajudante precisa ser capaz não apenas de carregar coisas pesadas, mas “também de dar um abraço ou apertar a mão de alguém”, acrescentou.
A equipe de pesquisadores liderada pela Suíça se inspirou nos 600 músculos do corpo humano para criar algo que pode andar e pular de uma maneira mais fluida e ágil.
Para fazer isso, eles usaram “músculos artificiais”, também conhecidos como atuadores eletro-hidráulicos.
Esses atuadores macios, que lembram sacos plásticos para congelamento, são preenchidos com óleo e têm eletrodos conectados.
A maneira como o líquido se contrai e se expande permite que a tecnologia imite mais de perto os músculos dos animais.
O sistema eletrostático também significa que quando o joelho do robô está dobrado, como uma pessoa ficaria agachada, o sistema usa menos eletricidade do que os motores tradicionais, disse o estudo.

A perna robótica salta por diferentes terrenos. Crédito: Thomas Buchner / ETH Zurich e Toshihiko Fukushima / Instituto Max Planck de Sistemas Inteligentes
De acordo com os pesquisadores, a perna consegue lidar com terrenos acidentados com mais agilidade do que suas antecessoras rígidas.
Ele conseguiu saltar quase 13 centímetros (cinco polegadas), o que corresponde a 40% de sua altura, segundo o estudo.
A pesquisa sobre atuadores eletro-hidráulicos é relativamente nova, tendo surgido o campo há apenas seis anos.
Os pesquisadores reconheceram que a perna simplista atualmente não consegue se mover livremente, apenas saltando em círculos.
. Com o tempo, a energia é perdida na forma de calor. Em contraste, os músculos artificiais (direita), que funcionam no princípio da eletrostática e são eficientes, permanecem frios, porque nenhuma corrente flui através deles sob uma carga constante. Crédito: Thomas Buchner / ETH Zurich e Toshihiko Fukushima / MPI-IS")
Quando as pernas robóticas precisam manter uma certa posição por um longo tempo, muita corrente flui através do motor DC que as aciona (esquerda). Com o tempo, a energia é perdida na forma de calor. Em contraste, os músculos artificiais (direita), que funcionam no princípio da eletrostática e são eficientes, permanecem frios, porque nenhuma corrente flui através deles sob uma carga constante. Crédito: Thomas Buchner / ETH Zurich e Toshihiko Fukushima / MPI-IS
Então, qualquer robô que use esses músculos artificiais ainda está longe de ser criado.
Mas os componentes para fazer esses músculos artificiais não são caros, disse Katzschmann, acrescentando que espera que a produção em massa possa acelerar os avanços nos próximos anos.
Mais informações:
Perna robótica musculoesquelética eletro-hidráulica para locomoção ágil, adaptável e com baixo consumo de energia, Comunicações da Natureza (2024). DOI: 10.1038/s41467-024-51568-3
© 2024 AFP
Citação: Primeira perna de robô com ‘músculos artificiais’ salta com agilidade: Estudo (2024, 9 de setembro) recuperado em 9 de setembro de 2024 de https://phys.org/news/2024-09-robot-leg-artificial-muscles-nimbly.html
Este documento está sujeito a direitos autorais. Além de qualquer uso justo para fins de estudo ou pesquisa privada, nenhuma parte pode ser reproduzida sem permissão por escrito. O conteúdo é fornecido apenas para fins informativos.
.