.
. DOI: 10.1002/sstr.202400245")
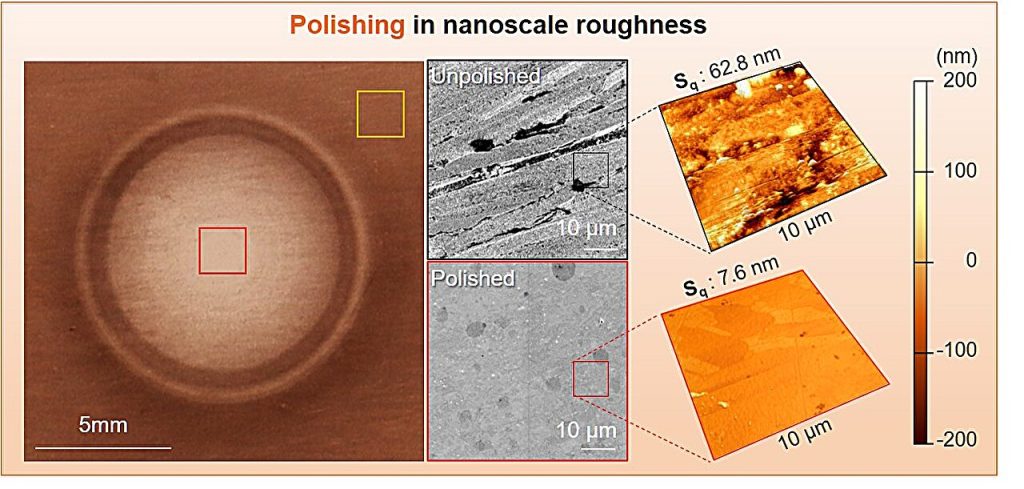
Polimento Spinbot: Imagens AFM e rugosidade da superfície do cobre bruto antes e depois do polimento. Crédito: H. Je et al., Estrutura pequena (2024). DOI: 10.1002/sstr.202400245
Uma equipe de pesquisa revelou uma tecnologia inovadora para polimento e limpeza de superfícies de ultraprecisão usando micro spinbots magnéticos operando simultaneamente. Esses pequenos robôs, capazes de remoção e polimento de contaminantes em escala nanométrica, oferecem uma alternativa leve, escalável e econômica para indústrias avançadas como semicondutores e óptica.
As descobertas da equipe foram publicadas na revista Pequenas Estruturasonde eles destacam o potencial dos robôs magnéticos macios para revolucionar a fabricação de precisão. Os pesquisadores foram liderados pelo Professor Sanha Kim do Korea Advanced Institute of Science and Technology (KAIST) e pelo Professor Jeong Jae (JJ) Wie da Hanyang University.




Na produção de semicondutores de alta densidade, atingir rugosidade de superfície ultrabaixa em camadas de metal é crucial para o desempenho do dispositivo. Mesmo pequenas imperfeições podem levar a defeitos que degradam a eficiência e a confiabilidade dos componentes eletrônicos.
Além disso, garantir que as superfícies estejam livres de contaminantes durante o processo de fabricação é essencial para evitar a introdução de partículas que podem comprometer a funcionalidade dos dispositivos. Para atender a esses requisitos rigorosos, tecnologias de polimento e limpeza de ultraprecisão se tornaram componentes-chave na fabricação de semicondutores.
Métodos tradicionais, como planarização química-mecânica (CMP) e sistemas de limpeza pós-CMP, têm sido o padrão da indústria para planarização de superfície e remoção de contaminantes. No entanto, esses sistemas apresentam desvantagens significativas. O equipamento CMP não é apenas grande e complexo, mas também extremamente caro, o que o torna difícil de dimensionar ou atualizar.
Além disso, os consumíveis usados nesses processos, como almofadas de polimento, pasta abrasiva e escovas de limpeza, são caros e precisam de substituição frequente, aumentando as despesas operacionais. Essa combinação de altos custos iniciais e requisitos de manutenção contínua representa um grande desafio para os fabricantes que buscam reduzir os custos de produção e, ao mesmo tempo, melhorar o rendimento.
Para lidar com esses desafios, a equipe de pesquisa desenvolveu “spinbots”, microrrobôs acionados por campos magnéticos externos que realizam polimento e limpeza de superfícies de ultraprecisão. Os spinbots, feitos de poliuretano termoplástico–Fe3O4 nanocompósitos, são controlados por um agitador magnético, criando um campo magnético rotativo.
Esta configuração, embora muito menor e mais simples do que o equipamento tradicional, permite que os spinbots girem e pivotem autonomamente sobre superfícies, alcançando uma eficiência de limpeza notável de 99,6% ao remover contaminantes de tamanho nanométrico. Além de suas capacidades de limpeza, esses robôs podem polir superfícies com uma suavidade surpreendente, atingindo níveis de rugosidade tão baixos quanto a rugosidade média (Ra) de 1,8 nm.
O que torna essa tecnologia verdadeiramente inovadora é sua capacidade de operar múltiplos spinbots simultaneamente. Até 42 spinbots foram mostrados trabalhando juntos em três wafers empilhados verticalmente, oferecendo escalabilidade e eficiência sem precedentes em engenharia de superfície. Apesar de sua pequena escala, o sistema spinbot é 1.000 vezes mais leve do que as ferramentas de polimento convencionais, mas oferece resultados comparáveis ou até superiores.
Além disso, os spinbots são capazes de realizar polimento de abrasão de três corpos. Neste processo, partículas de sílica dura são capturadas entre o spinbot e a superfície que está sendo polida, removendo gradualmente o material com precisão de nível nanométrico. Este método produz um acabamento suave como um espelho, rivalizando com técnicas de última geração como polimento por feixe de íons e polimento magnetorreológico, mas a uma fração do custo e do tamanho do equipamento.
. DOI: 10.1002/sstr.202400245")
Escalabilidade de processo por meio de múltiplas operações Spinbot para multicamadas. Crédito: H. Je et al., Estrutura pequena (2024). DOI: 10.1002/sstr.202400245
Uma das principais vantagens da tecnologia spinbot é sua sustentabilidade. Os métodos tradicionais de polimento e limpeza exigem grandes quantidades de energia e frequentemente usam produtos químicos perigosos. Em contraste, os spinbots são alimentados por um campo magnético, eliminando a necessidade de tais produtos químicos e reduzindo o impacto ambiental. Além disso, os robôs são reutilizáveis, aumentando ainda mais a sustentabilidade da tecnologia.
A equipe de pesquisa prevê um futuro em que a tecnologia spinbot é integrada a sistemas de produção automatizados, oferecendo capacidades de fabricação de ultraprecisão a um custo menor e com impacto ambiental mínimo. Esse avanço representa um passo significativo em direção à fabricação autônoma, em que esses microrrobôs podem ser usados em aplicações que vão de semicondutores a óptica e além.
Mais informações:
Hyeongmin Je et al, Polimento e limpeza ultrapreciso espacialmente seletivos por comportamento coletivo de micro spinbots, Pequenas Estruturas (2024). DOI: 10.1002/sstr.202400245
Fornecido pela Universidade de Hanyang
Citação: Micro spinbots magnéticos podem realizar polimento e limpeza de superfícies ultraprecisos (2024, 20 de setembro) recuperado em 20 de setembro de 2024 de https://phys.org/news/2024-09-magnetic-micro-spinbots-ultraprecise-surface.html
Este documento está sujeito a direitos autorais. Além de qualquer uso justo para fins de estudo ou pesquisa privada, nenhuma parte pode ser reproduzida sem permissão por escrito. O conteúdo é fornecido apenas para fins informativos.
.