

.
Desde segurar uma bola até segurar delicadamente um pauzinho, uma nova mão robótica desenvolvida por cientistas no Reino Unido pode pegar uma variedade de objetos apenas movendo o pulso e sentindo sua “pele”.
O apêndice impresso em 3D foi projetado para ser de baixo custo e eficiente em termos de energia, capaz de realizar movimentos complexos, apesar de não poder usar cada dedo independentemente.
O professor Fumiya Iida, da Universidade de CambridgeBio-Inspired Robotics Laboratory, disse que o objetivo era “simplificar a mão o máximo possível”.




A maioria dos robôs avançados capazes de feitos semelhantes à mão humana têm dedos totalmente motorizados, tornando-os mais difíceis e caros de produzir.
Mas essa alternativa mais barata provou ser notavelmente capaz em mais de 1.200 testes – incluindo saber quanta pressão aplicar a um determinado objeto.
Mais notícias sobre ciência e tecnologia:
Leitor de notícias gerado por IA estreia
China ganha outro rival do ChatGPT
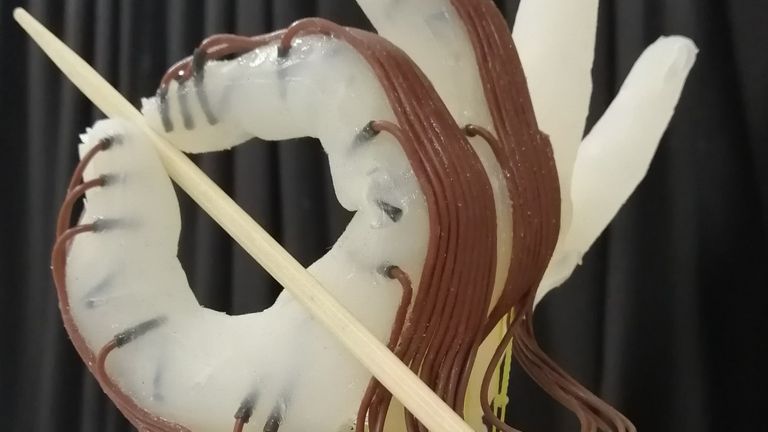
Uma mão robótica empunhando delicadamente um pauzinho. Foto: Universidade de Cambridge
‘Pele de robô’ ajuda a julgar a força necessária
Embora você deva saber instintivamente como manusear delicadamente um ovo sem quebrá-lo e estragar o café da manhã, os robôs precisarão de treinamento para reconhecer a quantidade certa de força necessária.
Nesse caso, os pesquisadores implantaram sensores na mão para que ela pudesse sentir o que estava tocando.
Ele usou tentativa e erro para aprender que tipos de pegada seriam bem-sucedidos – começando com bolas e depois passando para tudo, desde pêssegos e plástico-bolha até um mouse de computador.
O co-autor do estudo, Thomas George-Thuruthel, agora da University College London, disse que os sensores eram “como a pele do robô”.
“Não podemos dizer exatamente quais informações o robô está obtendo”, acrescentou, “mas teoricamente pode estimar onde o objeto foi agarrado e com quanta força”.
O robô também pode prever se vai derrubar um objeto e se adaptar de acordo.
Os pesquisadores esperam que a mão robótica possa ser melhorada ainda mais, como adicionar recursos de visão computacional e ensiná-la a explorar seus arredores para captar uma variedade maior de objetos.
Os resultados são relatados na revista Advanced Intelligent Systems.
.



