
.
Congelada e árida, a paisagem do Ártico pode parecer desinteressante, mas para os cientistas do Laboratório de Propulsão a Jato (JPL) da NASA, esse ambiente oferece uma chance única de estudar os efeitos do aquecimento global. Para fazer isso, a equipe está desenvolvendo uma série de robôs autônomos que têm 8 pés de comprimento e estão equipados com sensores especializados para medir como a água quente do oceano interage com o gelo. O projeto, chamado Nó de Gelopoderiam explorar as desconhecidas e perigosas águas congeladas das camadas de gelo do Ártico.
O Alto Ártico: Uma Área Traiçoeira
O Polo Norte e áreas próximas têm sido uma área de interesse por muitas décadas, desde desenvolvendo uma rota para a União Soviética durante a Segunda Guerra Mundial para patrulhar a área com submarinos para estabelecer territórios claros.
Antes da década de 1930, atravessar este terreno traiçoeiro era complicado, pois os submarinos ainda não eram avançados o suficiente para navegar nas calotas polares. Exploradores como Ernest Shackletonque fez seu nome explorando Antárticaforam um dos muitos que encontraram um destino comum ao explorar os polos norte e sul: os navios não conseguiam detectar blocos de gelo na água até que fosse tarde demais, e eles caíram.




Foi somente em 1958 que o submarino norte-americano, o Nautlius, fez o primeiro de todos para o Pólo Norte. O submarino nuclear começou em Point Barrow, Alasca, e então viajou quase 1.000 milhas para atingir o topo do Polo Norte antes de girar e pousar na Islândia. A viagem foi parte de uma missão ultrassecreta com o codinome “Operação Sunshine”, e mostrou a primeira prova de que os submarinos poderiam operar totalmente submersos.
Parte do NautilusO sucesso de foi a invenção do sonar. Sonar (de entãoe jávigamento r(anging) foi proposto pela primeira vez em meados da década de 1910 como uma forma de os submarinos detectar icebergs. Usando um projetor que pudesse refletir ondas sonoras em objetos, um indivíduo poderia “ver” quais objetos estavam à sua frente, dependendo de como as ondas sonoras eram refletidas. Um sistema rudimentar era construído em 1918 por cientistas dos EUA e do Reino Unido.
Embora os dispositivos de sonar tenham melhorado muito desde seu desenvolvimento inicial, a navegação de submarinos hoje ainda apresenta desafios. Camadas espessas de gelo ártico podem bloquear um submarino de emergir e interferir com instrumentos de sonar, o que pode ser prejudicial em emergências. No entanto, o ambiente único que o Círculo Polar Ártico e as áreas ao redor fornecem faz com que os perigos valham a pena uma visita.
Estudando o derretimento do gelo do Ártico
O Ártico contém tanto gelo que, se todo ele derretesse, o nível global do mar aumentaria em média 200 pés (ou 60 metros). Dado o seu grande número de camadas de gelo, os cientistas esperam entender melhor o processo de derretimento no Ártico, pois isso pode dar a eles modelos mais precisos de como as taxas de aquecimento da Terra afetam os outros oceanos. Especialistas querem especialmente estudar plataformas de geloblocos de gelo com quilômetros de extensão que se projetam da terra e podem retardar o fluxo de camadas de gelo para o mar. No entanto, as áreas que contêm plataformas de gelo são quase impossível para um submarino navegar, pois o gelo entra em contato com a costa, tornando as passagens estreitas e cheias de perigos potenciais.
Desenvolvendo uma frota de robôs
“Há anos que ponderamos como superar estes desafios tecnológicos e logísticos e acreditamos que encontrámos uma forma”, disse Ian Fenty, responsável científico da IceNode. explicado em uma declaração. “O objetivo é obter dados diretamente na interface de derretimento do gelo-oceano, abaixo da plataforma de gelo.”

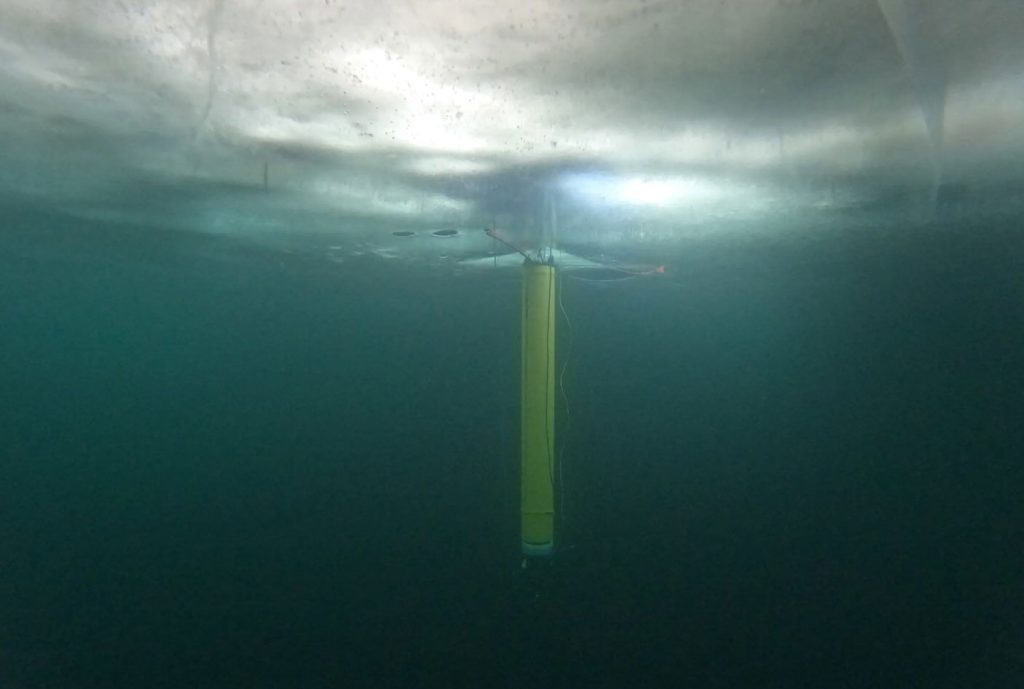
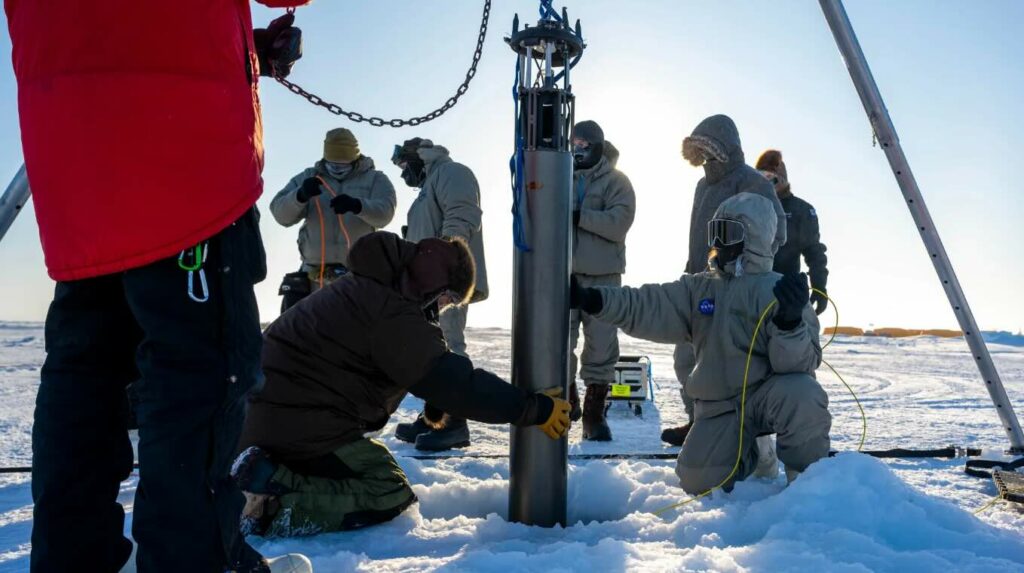
Para superar esse desafio, os cientistas do NASA JPL estão desenvolvendo uma série de robôs cilíndricos totalmente autônomos. Cada robô tem aproximadamente 8 pés de comprimento e 10 polegadas de diâmetro, equipados com trem de pouso de três pernas que permite que ele se prenda com segurança à parte inferior do gelo.
Uma vez implantados através de furos ou de embarcações, eles irão cavalgar as correntes oceânicas para seus alvos, onde eles se fixarão na parte inferior do gelo para coletar dados cruciais ao longo de um ano. Esses dados ajudarão os cientistas a prever melhor a elevação do nível do mar medindo com precisão as taxas de derretimento do gelo em regiões antes inacessíveis.
Recente testes nas águas geladas do Mar de Beaufort, após testes anteriores na Baía de Monterey e no Lago Superior, na Califórnia, mostraram resultados promissores. Embora seja necessário mais desenvolvimento, o projeto IceNode pode nos ajudar não apenas a navegar em algumas das águas mais frias, escuras e desconhecidas do Ártico, mas também a entender melhor os efeitos das mudanças climáticas.
Kenna Hughes-Castleberry é a Comunicadora Científica no JILA (um instituto de pesquisa de física líder mundial) e uma escritora científica no The Debrief. Siga e conecte-se com ela em X ou entre em contato com ela por e-mail em kenna@thedebrief.org
.

